
Karanlıkta Bir Robot Olmak
Kendinizi zifiri karanlık, hiç bilmediğiniz bir binanın içinde hayal edin. Elinizde sadece dar bir alanı aydınlatan bir el feneri (sensörleriniz) ve boş bir not defteri (hafızanız) var.
Göreviniz iki aşamalı:
- Nerede olduğunuzu bulmak (Konumlandırma - Localization).
- Binanın haritasını çıkarmak (Haritalama - Mapping).
Ancak burada klasik bir paradoksla karşılaşırsınız: Harita olmadan nerede olduğunuzu tam olarak bilemezsiniz, nerede olduğunuzu bilmeden de doğru bir harita çizemezsiniz.
İşte robotik dünyasında bu "Tavuk mu yumurtadan, yumurta mı tavuktan?" problemine SLAM (Simultaneous Localization and Mapping) yani Eş Zamanlı Konumlandırma ve Haritalama diyoruz. SLAM, bir robotun bilinmeyen bir ortamda hem harita oluşturmasını hem de bu harita içinde kendi konumunu tahmin etmesini sağlayan algoritmalar bütünüdür.
SLAM’in Temel Bileşenleri
SLAM'in o dışarıdan karmaşık görünen yapısını çözebilmek için, öncelikle bu sistemin üzerinde durduğu temel yapı taşlarını iyi anlamamız gerekiyor. Robotik dünyasının alfabesi diyebileceğimiz bu kavramları bilmeden, büyük resmi görmemiz zor.
Bir SLAM sistemini ayakta tutan dört ana sütun şunlardır:
1. Konumlandırma (Localization) En basit haliyle robotun kendi kendine sorduğu "Şu an tam olarak neredeyim?" sorusunun cevabıdır. Teknik olarak ifade edersek; robotun bir koordinat düzlemi üzerindeki anlık pozisyonunun (x ve y koordinatları) ve yüzünün hangi yöne dönük olduğunun (theta açısı) sürekli olarak hesaplanmasıdır.
2. Haritalama (Mapping) Robotun içinde bulunduğu dünyayı kaydetme sürecidir. Robot hareket ettikçe çevresindeki duvarların, köşelerin veya engellerin yerlerini tespit eder. Bu verileri birleştirerek, bilinmeyen o karanlık ortamın anlaşılır bir planını, yani haritasını çıkarır.
3. İşaretçiler (Landmarks) Bunları robotun haritasındaki "çıpa" noktaları veya deniz fenerleri gibi düşünebilirsiniz. Çevrede bulunan, diğer nesnelerden kolayca ayırt edilebilen ve robotun nerede olduğunu hatırlamak için referans aldığı sabit özelliklerdir (örneğin belirgin bir kolon veya bir kapı kirişi).
4. Sensörler Bizim için gözler ve denge duyusu neyse, robot için de sensörler odur. Robotun dış dünyayı algılama araçlarıdır.

Nasıl Çalışır? Graph SLAM ve "Yaylı Ağ" Modeli
Peki, sensörlerden gelen bu karmaşık veriler nasıl oluyor da tutarlı bir haritaya dönüşüyor? Bu noktada işin mutfağına, yani Graph SLAM algoritmasına giriyoruz.
Bu sistemi anlamak için robotun hafızasında kurduğu yapıyı, esnek yaylarla birbirine bağlanmış devasa bir ağ gibi hayal edin. Bu yapıda iki temel oyuncu vardır:
- Düğümler (Nodes): Robotun durduğu her nokta ve haritadaki her işaretçi (örneğin bir kolon) birer düğümdür.
- Yaylar/Bağlantılar (Constraints): Sensörlerden gelen ölçümlerdir. Robot "1 metre ileri gittim" dediğinde, önceki konumu ile şimdiki konumu arasına 1 metre uzunluğunda sanal bir yay yerleştirir.
Robot hareket ettikçe bu ağı örmeye devam eder. Ancak sensörler asla %100 mükemmel değildir. Bazen "1 metre" dediği yer aslında "1.1 metre" olabilir. Bu küçük hatalar, ağdaki yayların gerilmesine ve haritanın şeklinin bozulmasına neden olur. Graph SLAM algoritmasının görevi, bu gerilimi (enerjiyi) minimuma indirecek şekilde düğümleri çekiştirip en doğru pozisyona oturtmaktır.
Kritik Bir Kavram: Loop Closure (Döngü Kapanışı)
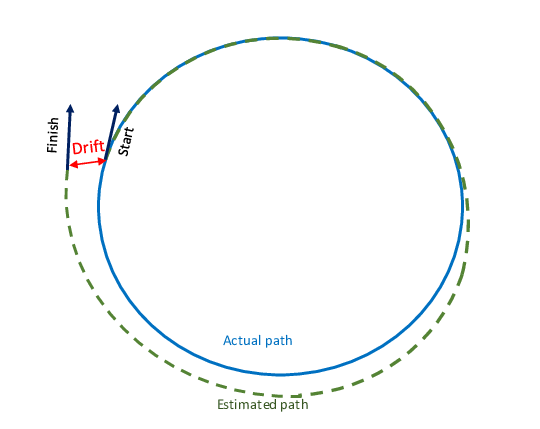
Robot uzun süre hareket ettiğinde, biriken küçük hatalar (Drift) nedeniyle harita gerçeklikten kopmaya başlar. Robot koridorun düz olduğunu sanarken, haritasında koridor sağa doğru bükülüyor olabilir.
İşte tam bu anda Loop Closure (Döngü Kapanışı) devreye girer.
Robot, daha önce geçtiği bir noktaya geri döndüğünde (örneğin başladığı odaya), sensörleri sayesinde ortamı tanır: "Bir dakika, ben bu kapıyı daha önce görmüştüm!"
Bu farkındalık anında, robotun şu anki konumu ile o eski konum arasında çok güçlü, yeni bir "yay" daha eklenir. Bu yeni bağlantı, sistemdeki tüm denklemi kilitler. O ana kadar gevşek ve hatalı duran tüm yaylar bir anda gerilir, düğümler kayar ve harita "tık" diye doğru şekline oturur. Loop Closure, bulanık bir fotoğrafın bir anda netleşmesi gibidir.
Günlük Hayatta SLAM: Sadece Laboratuvarda Değil
SLAM teknolojisi kulağa çok teorik gelse de, aslında şu an hayatımızın tam içinde sessizce çalışıyor:
- Robot Süpürgeler : Evinizi süpürürken rastgele çarpışan o eski modeller tarih oldu. Yeni nesil robotlar, SLAM sayesinde evin krokisini çıkarır, hangi odanın temizlendiğini bilir ve şarjı bitince istasyonunu eliyle koymuş gibi bulur.

- Otonom Araçlar: Sürücüsüz arabalar; şeritleri, diğer araçları ve yayaları algılayıp anlık olarak haritalandırarak güvenli bir rota oluşturur. Onlar için trafik, sürekli güncellenen dinamik bir SLAM problemidir.
- Artırılmış Gerçeklik (AR): Telefonunuzda bir mobilyanın odanızda nasıl duracağına bakarken veya bir AR oyunu oynarken, cihazınızın kamerası odayı tarayıp sanal objeleri doğru zemine sabitlemek için arka planda SLAM çalıştırır.
Sonuç
SLAM, robotların "gözü kapalı" oldukları bir dünyada gören gözleri ve hafızalarıdır. İster Mars yüzeyinde gezinen bir keşif aracı olsun, ister salonunuzu süpüren küçük bir yardımcı; hepsi aynı temel matematiksel prensiple, bilinmezliğin içinde bir yol inşa eder.
Bu teknoloji, makinelerin dünyayı bizim gibi (hatta bizden daha hassas) algılamasını sağlayan en büyük adımdır. Eğer bir gün robotlar aramızda tamamen otonom dolaşacaksa, bunun yolu SLAM'den geçecektir.
Yorumlar (1)
Yorum yapmak için giriş yapın veya kayıt olun.